并行的世界,没有同步,就失去了秩序,就会乱作一团!试想,交通没有红绿灯,生产线产品装配没有一定的顺序… 结果是显而易见的。多个线程也需要同步,否则程序运行起来结果不可预测,这是我们最不能容忍的。交通的同步机制就是红绿灯,Pthread提供了互斥量(mutex)和条件变量(Condition Variables)两种机制去同步线程。
1. 不变量,临界区和判定条件
不变量(Invariant):程序所做的一些假设,特别是指变量之间的关系。如:一个queue,有头节点,和其它数据节点,这些元素之间的连接关系就是不变量。当程序里面不变量遭受破坏时,后果往往是很严重的,轻则数据出错,重则程序直接崩溃。
临界区(Critical Section):处理共享数据的一段代码。
判定条件(Predicates):描述不变量状态的逻辑表达式。
2. 互斥量(Mutex)
一般,多个线程之间都会共享一些数据,当多个线程同时访问操作这些共享数据时。问题出来了,一个线程正在修改数据时,另外一个可能也去操作这些数据,结果就会变得不一致了。如(gv=0是共享的数据):
线程A:a = gv; gv = a + 10;
线程B: b = gv; gv = a + 100;
可能发生A执行完a=gv(0)时,B开始执行b=gv(0); gv=a+100,此时gv=100,然后a执行gv=a+10,最后gv=10。并不是我们要的结果,我们的想法是两个线程并发的给gv加上一个值,期望结果110。^_^ 若这是你银行卡的余额,若没有同步,那就惨了(你往卡里打钱,你有个朋友也同时往你卡里汇钱,很有可能余额只仅加上一方打的)。
互斥量就是为了解决这种问题而设计的,它是Dijkstra信号量的一种特殊形式。它使得线程可以互斥地访问共享数据。如:
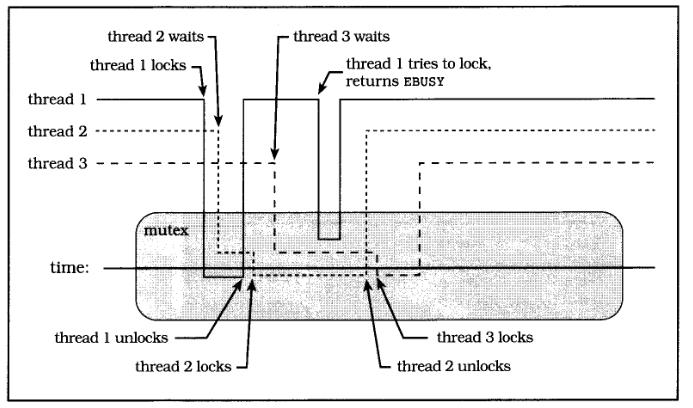
上图展示了三个线程共享一个互斥量,位于矩形中心线下方的线程锁定了该互斥量;位于中心线上方且在矩形范围内的线程等待该互斥量被解锁,出于阻塞状态,在矩形外面的线程正常运行。刚开始,mutex是解锁的,线程1成功将其锁定,据为己有,因为并没有其它线程拥有它。然后,线程2尝试去锁定,发现被线程1占用,所以阻塞于此,等到线程1解锁了该mutex,线程2立马将mutex锁定。过了会,线程3尝试去锁定mutex,由于mutex被锁定,所以阻塞于此。线程1调用pthread_mutex_trylock尝试去锁定个mutex,发现该mutex被锁定,自己返回继续执行,并没有阻塞。继续线程2解锁,线程3锁定成功,最后线程3完成任务解锁mutex。
3. 创建和销毁互斥量
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
int pthread_mutex_init(pthread_mutex_t* mutex, pthread_mutexattr_t* attr);
int pthread_mutex_destroy(pthread_mutex_t* mutex);
不要尝试去使用复制的的mutex,结果未定义。
静态创建,当mutex以extern或者static存储时,可以用PTHREAD_MUTEX_INITIALIZER初始化,此时该mutex使用默认属性。
1 |
|
动态创建,往往使用mutex时,都会将它和共享数据绑在一起,此时就需要pthread_mutex_init去动态初始化了,记得用完后pthread_mutex_destroy。
1 |
|
4. 锁定和解锁
原则见上面。
int pthread_mutex_lock(pthread_mutex_t* mutex);
int pthread_mutex_trylock(pthread_mutex_t* mutex);
int pthread_mutex_unlock(pthread_mutex_t* mutex);
1 |
|
5. 调整mutex大小
mutex应该多大?这里的大小是相对的,如mutex锁定到解锁之间的代码只有一行,比起有10行的就小了。 原则是:尽可能大,但不要太大(As big as neccessary, but no bigger)。考虑下面的因素:
1> mutex并不是免费的,是有开销的,不要太小了,太小了程序只忙于锁定和解锁了。
2> mutex锁定的区域是线性执行的,若太大了,没有发挥出并发的优越性。
3> 自己掂量1和2,根据实际情况定,或者尝试着去做。
6. 使用多个mutex
使用多个mutex一定要注意,防止死锁(deadlock)发生。下面是一个典型死锁:
线程A:pthread_mutex_lock(&mutex_a); pthread_mutex_lock(&mutex_b); ...
线程B:pthread_mutex_lock(&mutex_b); pthread_mutex_lock(&mutex_a); ...
存在这种可能,线程A执行了第一句,锁定了mutex_a;然后线程开始执行第一句锁定mutex_b;然后他们互相等待解锁mutex,A等mutex_b被解锁,B等mutex_a被解锁,不肯让步,出于死锁状态。
1 |
|
解决死锁的方法:
a. 固定锁定顺序(Fixed locking hierarchy):锁定mutex的顺序固定。
线程A:pthread_mutex_lock(&mutex_a); pthread_mutex_lock(&mutex_b); ...
线程B:pthread_mutex_lock(&mutex_a); pthread_mutex_lock(&mutex_b); ...
b. 尝试和回退(Try and back off): 锁定第一个后,尝试锁定下一个,若锁定成功,继续尝试下一个,若锁定失败,解锁先去锁定的。
解锁顺序不会引起死锁.
1 |
|
7. 锁定链
一般用于遍历数据结果(树,链表),一个用于锁定指针,一个锁定数据。
形如:
pthread_mutex_lock(&mutex_a);
pthread_mutex_lock(&mutex_b);
...
pthread_mutex_unlock(&mutex_a)
...
pthread_mutex_unlock(&mutex_b)
注意,锁定链往往会出现大量的锁定和解锁操作,有时会得不偿失。
